转载自“清华管理评论”微信公众号
作者:王红丽 等

导语
在智能技术广泛嵌入组织的背景下,机器人正逐步从工具转变为合作伙伴,其对个体创造力自我效能感的影响机制亟待探讨。本文回溯了合作伙伴概念的演化,归纳了机器人作为合作伙伴激发人类创造力自我效能感的四种关键路径:视觉唤醒、模式驱动、观察学习与人机合作。对深化人机协作理解与赋能实践具有重要意义。
文 / 王红丽、黄文暄、陈政任
随着第四次工业革命的深入推进,现代企业正越来越多地将机器人(尤其是搭载人工智能技术的机器人)深度融入工作流程。人类与机器人的协作模式已从简单的“工具使用”升级为复杂的“团队合作”——机器人不再只是被动执行命令的工具,而是能像“团队成员”一样,与人类共同分析信息、提供建议甚至参与决策。
凭借机器学习、自然语言处理和计算机视觉等技术的进步,智能机器人展现出强大的计算能力,能高效处理复杂数据并进行预测和决策。这催生了“人类—AI团队(Human-AI Teams)”的概念:人类与AI系统优势互补,共同完成任务、实现目标。这种新模式冲击了传统的人际合作关系,为企业间合作提供了全新可能。学者们普遍认为,人们对机器人伙伴的反应与对人类伙伴的反应存在显著差异。
在这一趋势下,如何激发人类在人机协作中的创造潜能成为关键议题。创造力自我效能感,指的是个体对自身产生创造性成果能力的信念。班杜拉(Albert Bandura)等学者指出,强烈的自我效能感是创造生产力和新知识发现的必要条件,因为它会影响人们从事特定行为的动机、能力以及对任务的追求意愿。同时,创造力自我效能感也是个人创造力的核心驱动因素。一个人要发挥创造力,首先要相信自己具备创造能力。
尽管机器人在组织中已从“工具”转向“伙伴”,但现有研究仍主要关注其在创造性任务中的技术表现(如文本生成、图像创作等“创造性输出”能力),对机器人如何影响人类的创造性心理基础(尤其是创造力自我效能感)的研究较少。这导致我们对“人机共创”的心理机制缺乏系统理解,可能阻碍机器人在企业中真正发挥赋能作用。
基于此,本文聚焦“机器人如何激发人类创造力自我效能感的心理机制”,旨在探究机器人是否具备激发人类创造信念的能力,并揭示其潜在影响路径。通过整合人机交互、社会认知与组织行为领域的研究成果,为“机器人如何成为企业中的积极赋能者”提供理论支持和实践启示。
合作伙伴的概念与起源
合作是人类社会最基础的互动形式之一,其起源可追溯到生物进化与自然选择的早期阶段。从生物学角度看,合作并非人类独有,而是广泛存在于各类生命体中。无论是微观的细胞机制,还是宏观的动物群体行为,个体间的合作与竞争都是生命体获取资源、延续基因的基本方式。其中,亲属关系被认为是促成合作倾向的关键基础。
英国博物学家、进化生物学家W.D.汉密尔顿(William Donald Hamilton)于1964年提出的“广义适合度理论”(Inclusive Fitness Theory)指出,个体更愿意与基因相近的亲属合作,通过利他行为间接提高自身基因的繁衍成功率。这一理论为解释自然界的合作行为提供了强有力的演化依据,成为社会行为理论的重要基石。
然而,随着生物学与行为生态学研究的深入,学界发现合作并非仅由亲属关系驱动。在资源稀缺、任务复杂或环境不确定时,个体选择合作对象会基于“能力属性”而非“血缘亲近”,即更倾向于选择能提高合作成功率的高能力个体。例如,研究发现,参与边界巡逻的雄性类人猿与所在种群未必有血缘关系,却会参与重要守护任务并获得分享食物的资格。这种基于功能价值的非亲属合作被称为“策略性合作”或“互利合作”,在多个物种中都有观察到。也就是说,合作的产生可能源于亲密的社会关系,也可能源于对目标实现的理性评估。
值得注意的是,尽管机器人缺乏真实的社会性,但其高度可编程性使其能模拟社会交互行为——通过语言风格、面部朝向、肢体动作等呈现“类社会线索”,进而触发人类的社会认知反应。这些模拟行为虽非源于真实情感,却足以让人类将其纳入合作关系的心理框架。此外,在智能技术深度融入组织运作的背景下,机器人不仅在角色上实现从“工具型执行者”向“认知型合作伙伴”转变,其任务能力也得到极大彰显,广泛参与到战略分析、创意设计与复杂协同等高阶认知任务中。从具体表现来看,凭借机器学习、自然语言处理和计算机视觉等技术的进步,智能机器人具备卓越的计算能力,能够对各种复杂的数据进行高效处理,实现精准预测和科学决策。这种强大的任务能力表现,使得机器人能够在与人类的协作中发挥重要作用。相关理论显示,当机器人系统在任务中展现出高度一致性和高成功率时,人类对其判断的信任度甚至可能超过对人类合作者的信任。这种基于功能评价与交互体验建立的“认知契约”,成为人机合作的心理基础,也意味着“非人类智能体”正被纳入合作伙伴的范畴。
总之,合作作为贯穿生物进化与社会发展的核心互动形式,其本质始终围绕“生存与发展”的根本目标展开。从“基因亲近”到“功能适配”的演进,印证了合作本质是生命体优化资源配置、提升存续概率的智慧选择(见图1)。
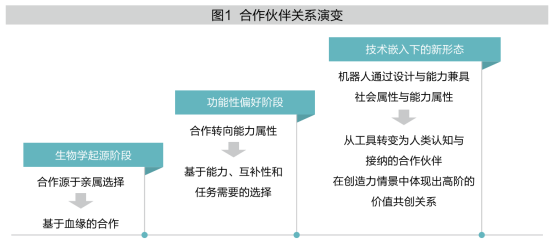
在机器人合作伙伴进入创造力工作情境后,机器人的出现将这一演进推向新维度。尽管缺乏真实社会性,但其通过“类社会线索”模拟社交行为的能力,以及在计算、预测、决策等任务中展现的高能力表现,成功触发了人类的社会认知机制,构建起基于功能信任的“认知契约”。这种从生物本能合作到人机协同共创的跨越,不仅是合作对象从人类同类到“非人类智能体”的拓展,更标志着合作逻辑从“情感与能力联结”向“价值共创”的升华。机器人以“认知型合作伙伴”的身份深度参与高阶创造性任务,不仅印证了合作本质对“效能”的永恒追求,更预示着在智能时代,合作的边界将持续突破传统认知,朝着更灵活、更高效的人机融合方向演进,为创造力激发与社会进步开辟全新可能。
机器人作为合作伙伴对人类创造力自我效能感的影响机制
在智能技术深度融入组织运作的背景下,机器人正从传统的“工具型执行者”转变为 “认知型合作伙伴”,广泛参与战略分析、创意设计和复杂协同等高阶认知任务。这种角色转变不仅重塑了社会分工,也对人类在协作中的心理机制提出了新挑战和新要求。
在创造性任务中,创造力的发挥不仅依赖外部资源支持,更受个体主观能力判断的影响。机器人要真正发挥“赋能者”作用,关键在于能否激发人类的创造性动机与信念,尤其是提升创造力自我效能感——即个体对自己完成创造任务能力的预期。
研究表明,机器人通过多维度交互方式,能影响人类在协作中的认知加工、行为反馈和情绪体验,进而作用于个体的自我判断与能力信念。但对于机器人如何通过具体机制激发人类创造效能,尤其是在多元合作情境中如何系统影响个体信念建构,相关研究仍显不足。
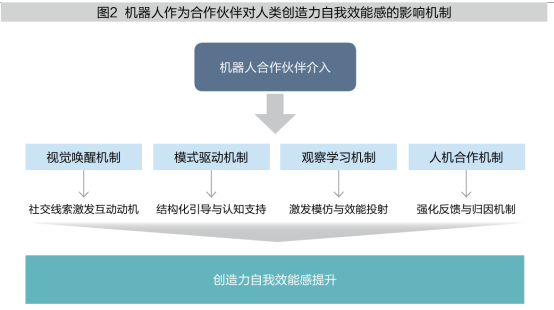
本文聚焦“机器人如何激发人类创造力自我效能感的心理机制”这一核心问题,梳理并归纳出四类关键路径:视觉唤醒、模式驱动、观察学习和人机合作。这四种机制分别对应从感官输入到认知加工,再到行为引导与社会反馈的多重心理通道,展现了机器人在赋能人类创造潜能中的多层次心理影响。
视觉唤醒:通过社交线索激发互动动机
视觉信息是人机交互中最直接、最具影响力的感知通道。研究显示,人类在与机器人互动时,会快速判断其外形特征、目光方向和面部表情,并据此调整自身的注意力分配和社交意图。人机交互领域研究表明,人类的行为比传统学者想象的要复杂得多。其中,感官线索对于人类的表现十分重要。例如,当人与人互动时,很大程度上是依靠视觉传递信息。当人与机器人合作时,视觉上的信息传递也非常重要。
其中一种视觉唤醒的机制是机器人眼睛的凝视作用。人形机器人的感觉运动能力发展迅速,可以丰富地展现视觉线索。也正因为此,人类可以操纵和利用这些线索。Hanna和班杜拉(Albert Bandura)证明,在合作任务中,人类的目光会被伙伴的目光引导到正确的目标上。也就是说,在人机交互情境下,人类也会注视人或机器人的眼睛,并倾向于跟随和利用凝视信息。例如,玛丽亚 施陶特(Maria Staudte)和马修 W 克罗克(Matthew W. Crocker)的研究证明,带有双眼的机器人的凝视可以产生一种凝视效应,即当机器人的实时凝视行为与人类相似时,人类对机器人语音的理解会得到改善。又如,在物理交互任务中,人类被试可以有效地利用人类和机器人伙伴的凝视线索,并且这些凝视可以影响人类行动的速度和准确性。与和人类伙伴合作时一样,在与机器人伙伴进行相同的合作任务时,人类被试对伙伴凝视这种视觉线索的感知可以显著提高自己在合作任务中的表现。
另外一种视觉唤醒的机制是机器人拟人化的作用。一般而言,人类倾向于像对待人类一样对待计算机和虚拟代理,人类更喜欢与那些具有社交能力与人类外形的、能够进行语言和非语言行为的机器人合作。也就是说,由于各种社交线索和具备沟通能力的原因,拟人化的机器人会被认为具有独立的意图,人类会对拟人化机器人进行更积极的评价。相反地,如果机器人不具备拟人化的样貌,则可能被认为会起到阻碍作用。例如,有研究表明,当被试自己在和机器人伙伴(而不是人类伙伴)合作时,与单独一个人工作相比,他们的表现会更差。
进一步而言,人类与人还是机器人合作的意愿是取决于具体情境的。首先是环境和归因的原因。例如,在投资情境下,在高回报的环境中,人们更喜欢低拟人化程度的机器人,而在低回报的环境中,人们更喜欢拟人化的机器人。又如,在购物情境下,在商品报价低于预期的时候,人们在与低拟人化机器人相处时的响应更积极,在商品报价高于预期的时候,人们在与高拟人化机器人或人类相处时的响应更积极。再如,在决策情境下,当决策对人类有利的时候,人们对高拟人化机器人或人类的响应更积极,当决策对人类不利的时候,人们对低拟人化机器人的响应更积极。其次是群体的原因。相比于群体外机器人,被试对群体内机器人响应更积极,且合作意图更明显,并且强烈希望将其拟人化。
总的来说,这些类型的人机合作的研究比较类似于人机博弈论的实验范式,从根本来说是基于利益的考量。一项研究表明,人—人的伙伴关系也可能扩展到人—机器人的伙伴关系中,其中信任起着关键作用。这些社交线索的有效激活,既提升了个体的合作意愿,也为其在协作任务中形成正向心理预期提供了感知基础。值得注意的是,机器人拟人化程度与人类反应之间并非简单的线性关系,其效果受情境特征(如回报结构、任务类型)和群体归属等多重因素调节。
从社会认知理论视角看,自我效能感的构建始于个体对环境中反馈线索的感知与解释。机器人通过模拟人类特征的非语言行为,能激发用户对其意图的积极归因,增强对合作过程可控性和可预测性的判断。此外,机器人的凝视行为、社交姿态和个性化反馈,也能向人类传递更多有效信息,有效提升人类在合作任务中的情绪投入和自信水平,进而显著增强其创造力自我效能感。
总之,机器人通过外貌拟人化、凝视行为和社会线索反馈等方式,有效唤起人类的视觉和社交感知系统,在合作初期建立积极的互动预期。这种感知层面的社会激活,不仅提升了人机交互的主动性,也增强了个体对自身完成创造任务能力的信念,从而显著提升创造力自我效能感。
模式驱动:提供结构化引导与认知支持
创造性任务通常具有高开放性、高不确定性和路径模糊等特征,容易导致个体在任务初期出现认知困扰、目标模糊或效能感不足。而机器人在合作中不仅可作为信息提供者,还能通过引导性语言、阶段性提示和结构化任务设计等各类合作模式,扮演认知引导者的角色——这不仅提升了任务的可控性,也缓解了个体面对未知挑战时的心理压力,从而构建更积极的任务动机和行动预期。
学者们探讨了合作模式的要素组成。例如,有学者提出四阶段机器人教学框架,通过激发动机、生成方案、协作执行与反思评价等模式,引导学生在系统性流程中发展创造力。又如,相关研究表明,清晰的交互流程和阶段化反馈机制有助于减少个体在创造活动中的不确定性,增强其任务掌控感和行动信心。在人机协作设计系统中,有研究发现人类设计师必须与机器协商物理空间和创意空间,并提出了未来人机协作设计模式的四个需要考虑的因素,包括管理共享的工作空间、沟通关于设计目标的偏好、尊重不同的设计风格、考虑设计行为的社会意义等。再如,研究发现当机器人与人类采用小组活动的合作模式时,还能额外激发人类间的协作,让人类更好地学习、集中注意力和回忆所学的知识,进而提高解决问题的创造力和学习能力。
从理论视角看,上述结构性的合作模式能够满足个体自我效能感形成的三个关键条件:对任务内容的掌控感、对路径的可预测性以及对成功反馈的期望值。机器人通过流程性引导模式带来的“认知可视化”,降低了任务的抽象性,使个体更容易将问题分解、方案制定和执行成果归因于自身能力的展现。这种基于外部结构化支持激发的“认知归属感”,是创造力自我效能感形成的重要路径之一。
因此,机器人通过提供任务结构、分阶段反馈和流程引导等合作模式,优化了个体在创造任务中的策略路径,有效提升了其在不确定情境中的心理安全感和信心水平,最终增强了“我有能力完成这一创造任务”的信念,促进创造力自我效能感的提升。
观察学习:通过创意示范激发模仿与效能投射
观察他人完成任务并取得成功,是个体建立自我效能感的重要心理机制——尤其当示范对象与自身有一定相似性或权威性时,模仿动机和自我认同更容易被激活。机器人作为 “可模仿对象”,在促进人类创造行为方面具有独特优势。
李浩祥(Hao Xiang Ali Li)及其同事的实证研究发现,人类可以模仿社交机器人伙伴的创造性行为,进而培养人类的创造力。具体而言,他让51名人类与机器人一起玩涂鸦创意游戏,为一些意义不明确的涂鸦撰写创意标题,其中他操纵设计了社交机器人的语言和非语言行为,以人工干预机器人的创造力:其中一组,人类与有创造力的机器人互动,另一组,人类与没有创造力的机器人互动。结果表明,人类可以模仿社交机器人伙伴的创造力行为,那些与有创造力的机器人互动的人类想出了更多的涂鸦标题,并且创造力评分更高。也就是说,人类在观察机器人展现高水平创造行为后,会主动模仿其行为模式,并表现出更高水平的创造性产出。这类观察学习过程不仅降低了行为尝试的风险感,也提升了个体对“创造行为可复制性”的判断。此外,与人类榜样相比,机器人不会带来社会评价压力,能为学习者提供更安全稳定的模仿环境。
从创造力自我效能感的形成机制来看,榜样行为通过三种路径影响个体:一是降低行动门槛,提升尝试意愿;二是提供任务范式,明确努力方向;三是增强对成功可达性的心理预期,皆有助于激发个体在创造性表达中的主动性和信心。
机器人通过呈现启发性创造行为,为人类提供了模仿参照,构建了“能力认同”的心理路径。其作为观察学习载体的功能,有效激发了个体的效能预期,增强了“我有能力完成类似创造行为”的信念,从而显著提升创造力自我效能感。
人机合作:在协同交互中实现正向反馈循环
机器人不仅是信息提供者和任务执行工具,更具备任务共创者和反馈者的潜力,能深度参与人类创造性任务的全过程。相较于传统的单向启发方式(如 PPT 展示、文本提示),人机合作的交互性、即时性和情境响应能力,为个体创造力自我效能感的建立提供了更具体、可感知的心理支撑路径。
人机合作在创造性工作领域被广泛关注。例如,有研究探索了人机合作与人类单纯观看PPT对创造力的影响。其中,一组被试受到机器人Robovie的启发,机器人通过引导性话语(如,“你能想到另一种方法吗?”)鼓励被试产生创造性的想法,并为每个被试提供相关的图像和视频信息;另一组被试则通过PPT演示形式接受同样的核心信息。最后,两组被试参与同样的日本禅宗岩石花园设计任务。结果显示,相比在PPT启发条件下,那些在机器人启发条件下的被试参与创造性任务的时间更长,并且产生的创造性表达更多。又如,有研究发现,机器人通过勾画草图的合作形式有利于设计师的早期构思。该研究设想和开发了一种Cobbie移动机器人,它们可以通过生成创新性和多样化的草图来与设计师合作构思。结果表明,Cobbie对于设计师来说十分明显地激发了探索行为和产生新颖的想法,并有力地吸引设计师参与合作。再如,有研究让一个富有表现力的运动机器人与即兴表演者合作创造一个故事的场景,结果发现,即兴表演者确实会把机器人视为一个支持性的伙伴,因为机器人可以积极地启发人类思考的方向。
在教育场景中,社交机器人对儿童创造力培养也有类似激励作用:例如,机器人通过 “促进型”语言策略激发儿童的正向情绪,有效提升其构思数量和原创性;又如,机器人通过颜色、动画、声音等多模态形式提高信息吸引力,激发人类在图形创造中的流畅性、灵活性和精致性。这一机制在沉浸式技术环境中同样成立,虚拟现实中的机器人反馈不仅提升了人类的创意产出,也显著增强了其创造力自我效能感。
从理论角度看,人机合作机制能提升创造力自我效能感,是因为它通过即时获得正向反馈、在可控的交互体验中产生成就感等满足了自我效能感建构的多个条件。持续的任务参与感和过程控制感是激发创造力自我效能感的关键心理变量。因此,机器人在创造任务中通过提供即时反馈、情境支持和合作互动,为人类创造行为提供了可归属的成就体验和正向认同路径,不仅提升了个体在交互中的信心,也实质性增强了“我能够完成这一创造任务”的心理信念,从而显著促进创造力自我效能感的发展。
综上,机器人作为合作伙伴,通过视觉唤醒、模式驱动、观察学习和人机合作四种机制,从感知引导、结构支持、行为模仿到交互反馈等多维度作用于人类创造过程,构建了影响创造力自我效能感的核心路径体系(见图2)。这一机制框架揭示了机器人在激发人类创造潜能方面的心理驱动效应,为理解人机协作的赋能机制提供了基础支持。
机器人合作伙伴对创造力自我效能感影响的未来议题
需深化对机器人影响创造力过程复杂性的探索
机器人伙伴对创造力过程的影响具有高度复杂性,需从多种机制、多元视角进行系统考量。本文将机器人伙伴对人类创造力自我效能感的影响方式归纳为视觉唤醒、模式驱动、观察学习和人机合作四种类型,这一分类揭示了机器人作为与人类伙伴具备同等角色、任务及决策能力的实体特征。值得注意的是,人们对机器人伙伴的动机、偏好与意图的感知,可能与对人类伙伴的感知存在显著差异。
随着机器人在人机交互中参与程度的不断加深,这些感知差异可能影响最终的创造性成果与过程,甚至偏离人类对合作结果的预期。因此,未来研究需进一步探讨技术参数(如算法精度)、设计特征(如交互界面友好度)、制度规范(如协作责任划分)、外形属性(如拟人化程度)、协作模式(如任务分配方式)等多维度因素,分析其如何作用于人类的创造力与创造力自我效能感,为构建更优的人机合作环境提供理论支撑。
技术介入下组织合作关系的重构需重点关注
当前鲜有研究针对技术介入组织情境后的合作关系进行系统性重构与考量。生物学研究表明,合作关系的建立与合作伙伴的选择,要么基于亲密的社会关系,要么源于对能力属性的理性评估,二者本质上均以利益为核心。然而,在现代技术密集型组织中,这种原始的合作逻辑可能发生微妙变化:当人类与机器人共存于合作系统时,人们对人类伙伴的评估往往兼顾亲密关系与能力属性双重维度,而对机器人伙伴的评估,到底是可能比人类合作伙伴的评估更宽松,还是比人类合作伙伴的评估更严格,值得深入思索。
这种差异可能导致与不同类型伙伴合作产生截然不同的结果,尤其在创造性任务中,合作关系的心理基础差异可能直接影响创造力自我效能感的形成。未来研究需深入探索组织场景下,人机合作与人际合作在信任建立、角色认知、责任归因等方面的差异,分析这些差异如何作用于创造性过程,并构建适配技术嵌入情境的合作关系理论框架。
直觉性合作偏好的生物学与心理学机制待揭示
直觉性合作关系背后,更深层的生物学与心理学机制仍有待揭示。我们注意到一个颇具启发性的研究论点:对多数人而言,与他人合作完成任务是一种直觉行为,无需以预先认识为前提。过去的研究表明,对他人特征的感知能力是人类在复杂群体环境中进化形成的关键能力,是顺利开启合作的前提。这启示我们,人们在创造性工作中对合作伙伴的偏好可能同样具有直觉性。
人类选择直觉性地倾向于与机器人合作伙伴合作,进而促进创造力自我效能感的提升,这一过程背后潜藏着更深层的生物学(如进化形成的社会感知机制)与心理学(如情绪调节、动机驱动)原因。未来研究可结合神经科学、进化心理学等跨学科方法,探索创造性合作中直觉性偏好的生理基础与心理路径,揭示人机合作中“直觉信任”的形成机制,为优化机器人伙伴的设计与交互策略提供更根本的理论支撑。
结语
第四次工业革命下,机器人作为合作伙伴,能够借助视觉唤醒、模式驱动、观察学习和人机合作等多重机制,在个体的感知、认知与情感层面形成联动效应,从而有效增强人类的创造力自我效能感。这一发现不仅丰富了人机交互对创造性心理机制影响的研究视角,还拓展了合作伙伴范畴中“非人智能体”被认知与接纳的理论边界。在企业实践场景中,这意味着机器人不再仅是任务执行的工具,更可能成为潜在的心理赋能者。其在组织中的合作价值,需要从单一的技术作用转向综合的认知建构机制来理解。未来,围绕机器人作为合作伙伴对创造过程的作用机制及其边界条件,仍存在诸多待解议题。学界与业界需要认识好、理解好、运用好机器人合作伙伴,才能使其成为自身创造力过程中的赋能者。
关于作者 | 王红丽:华南理工大学工商管理学院教授、博导,管理学系副系主任;
黄文暄:华南理工大学工商管理学院硕士研究生;
陈政任(通讯作者):中山大学旅游学院博士研究生。
责任编辑 | 高菁阳(gaojy@sem.tsinghua.edu.cn)

管理科学学报 ® 2026 版权所有
通讯地址:天津市南开区卫津路92号天津大学第25教学楼A座908室 邮编:300072
联系电话/传真:022-27403197 电子信箱:jmsc@tju.edu.cn